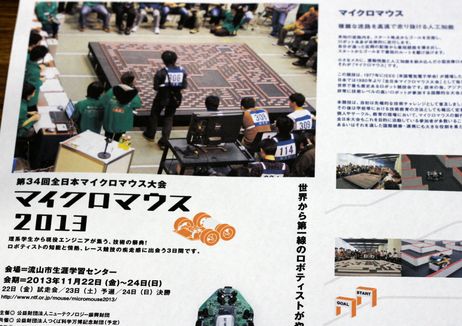
マイクロマウス競技は,自律型ロボットを製作して迷路を走らせて,ゴールに達する最短時間を競う競技です.
1980年より,全日本マイクロマウス大会が開かれていて,今まで40余年続いている歴史あるロボット競技会です.
1990年当時は,8bitマイコンを搭載したティッシュペーパーBOXぐらいの大きさのロボットに車輪を付けて走らせていましたが,最近は手のひらサイズのマウスが,高速で迷路を駆け抜けるレベルになっています.

迷路は縦16×横16の,合計256区画の正方形.一区画は18cm×18cmで,壁の高さは5cm厚さは1.2cm.
16×16の外周は壁が存在していて,一区画の角(格子点)には1.2cm×1.2cm×5cmの柱が立ち,終点の4区画中央の格子点を除いて少なくとも1枚の壁が接している.
壁の側面の色は白,壁の上面は赤,床面はつや消し黒.
迷路の始点は四隅の区画の1つにあり,時計回りに出発,終点は中央の4区画とする. 壁の情報は,自ら探索して記憶しなければならない.
マイクロマウスの製作では,
実機の製作
迷路探索アルゴリズム
モーター制御,センサー制御
など,総合的な知識が必要になります.
迷路探索アルゴリズムだけでも,しっかりと作っておけば,迷わずゴールできるのではないでしょうか.
実際のロボットを製作するのは難しいので,迷路探索のソフトウエアでシミュレーションしてみたいと思います.
常に左壁(右壁)に沿って進む.
迷路の中央にゴールがあると,行き着かずに外周を一周してしまう.
常に中心に近い方に進む.
一度通った区画には進まないように,迷路を記憶して進む.
未探査の区画では左手法の判断で進む.
一度通った区画には,戻る場合だけ進入を許す.
スタートとゴールの間の区画(実探査部分)に壁がないものとして求めた最短コースを進み,壁があれば最短コースを計算し直す.
絶えず最短コースを進み続ければ,いつかゴールに着くはずです.